Art Skills
Application of visual modeling in trajectory representation and optimization and manipulator control for robot art.

Technical projects I have worked on or am currently working on:
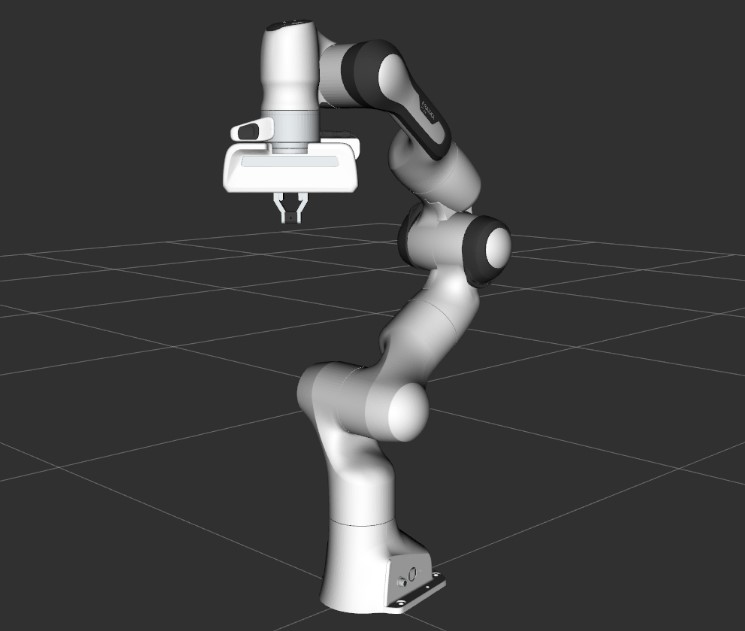
Application of visual modeling in trajectory representation and optimization and manipulator control for robot art.
Robot Kinematic Chain Clustering and Kinematic Modeling.
Starting soon: Applying ML algorithms for object ID.
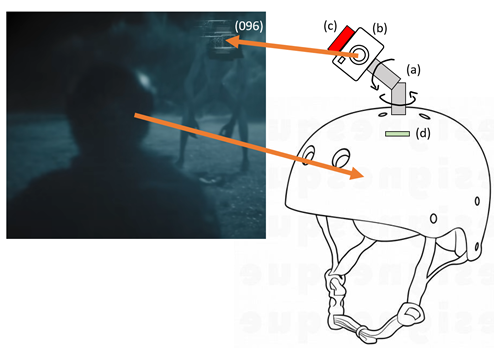
Starting soon: Creating a turret-mounted camera for object tracking and pose estimation.
Design of drill head and anchoring system for a robot probe capable of accessing the oceans under Europa’s icy surface.
Control, navigation, mapping, and disturbance rejection for the Turtlebot3.
Methodology for creating a scaleable, custom nonlinear spring used for antagonistic actuation.
Control, navigation, and task-oriented manipulation on the ATLAS robot.
Created an animatronic eye using shape memory allows and other soft actuation methods.
Fully designed and developed 2 mini rovers, each with a 5-DOF manipulator.
Added feedback control to a toy robot arm.
Worked in a team of 4 to design and manufacture the chassis for a Formula SAE vehicle.
Created 3 robots on the Ninjineers FRC team (2383).
Created an audio playback device that does not cause ear discomfort.